Фотограмметрическая съемка с помощью Javad Triumph-LS
« Назад Фотограмметрическая съемка с помощью Javad Triumph-LS 19.06.2015 05:28
Фотограмметрическая съемка с помощью Javad Triumph-LS 19.06.2015 05:28В ПО GNSS приемника Triumph-LS - J-Field существует 2 способа съёмки недоступных точек: с помощью промеров (рулеткой) и фотограмметрическим методом. Способ промеров с помощью рулетки известен достаточно давно и представляет из себя стандартную RTK-съёмку точек с последующим промером рулеткой от точки стояния до интересующего объекта с 2-3 точек стояния. Впоследствии решается геометрическая задача по нахождении координат неизвестной точки. Данный способ имеет ряд недостатков, связанных с трудностями непосредственного промера рулеткой, а также подбора оптимального вида рулетки (лазерный луч дальномера в дневное время плохо заметен, а измерительная рулетка имеет меньшую точность измерения и не подходит для промеров на коротких расстояниях).
Фотограмметрический метод не имеет вышеперечисленных недостатков, т.к. не нужно производить промеры до определяемых объектов (P) непосредственно. Главное условие - получение фотоснимков (с использованием камеры приёмника) с точек стояния (станции C1, C2, C3) во время съёмки (RTK).

Данная работа требует использования опорных точек, по которым впоследствии можно будет отождествить идентичные объекты на всех снимках. Кроме того, на всех снимках должен присутствовать определяемый объект. Опорные точки (rp1, rp2, rp3) должны иметь заранее известные координаты (предварительно координируются в режиме RTK или промеряются тахеометром).
Для удобства отождествления выбираются выделяющиеся точки или они закрепляются на местности яркими марками.

Примечательно, что можно обходиться даже без использования опорных точек, но при этом нужно, чтобы:
1) количество снимков используемых в работе от 3 до 5.
2) минимальное количество определяемых объектов, попавших на один снимок - 3.
3) минимальное количество снимков, на которых будет отмечен каждый объект - не менее 2-х.
В этом случае координаты недоступных объектов определяются относительно точек стояния(станции C1, C2, C3) (с полученными при помощи RTK-съёмки координат).
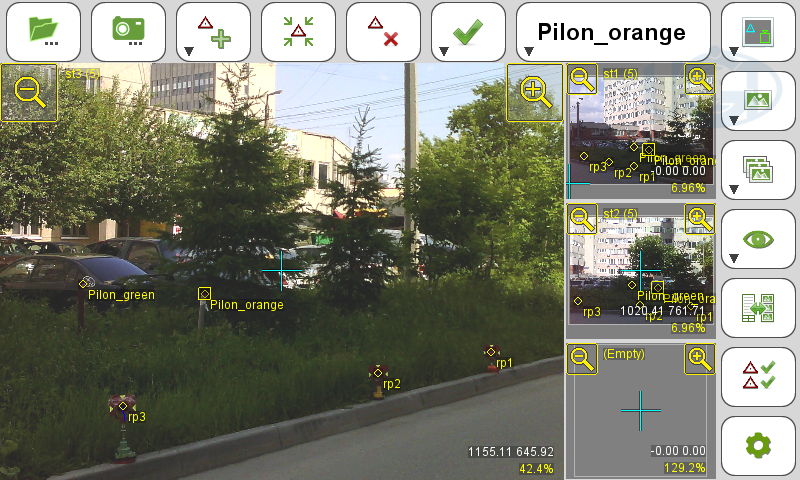
Определяемый объект отмечается на снимках по одной и той же части (точке на объекте):

Снимок с 1-й точки стояния (C1):

Снимок со 2-й точки стояния (C2):

Снимок с 3-ей точки стояния (C3):

При нажатию кнопки уравнивания (√) получаем рассчитанное метрическое и пиксельное отклонение, а выделяя интересующую строку (stolb), можно скопировать объект в проект (на карту):

Имеется возможность контролировать измерения - использовать часть опорных точек в качестве определяемых (check points - проверочные точки) - при этом, координаты, полученные по сопоставлению на снимках сравниваются с исходными координатами (полученными ранее в RTK или тахеометром) и выводится оценка точности для проверочных точек (check points):

После сохранения интересующих точек, они отобразятся на карте. По нажатию кнопки "List" можно получить доступ к окончательным координатам искомых точек:


Для получения подробной консультации и полевой демонстрации спутниковых приемников Javad GNSS Triumph-LS, Triumph-1, Triumph-2 можете в любой филиал УГТ-Холдинг.
Комментарии
Комментариев пока нет
Пожалуйста, авторизуйтесь, чтобы оставить комментарий.





{kind=link}
{kind=link}